Placa Arduino
Prezentarea plăcilor Arduino
Arduino reprezintă o familie de plăci ce se bazează pe microcontrolere și este destinată pasionaților de electronică, mecanică și programare, într-un cuvânt robotică. Arduino și-a făcut prima apariție în 2005, iar de atunci s-a dezvoltat din ce în ce mai mult.
Arduino nu este singura familie de plăci de dezvoltare, dar este cel mai cunoscut brand.
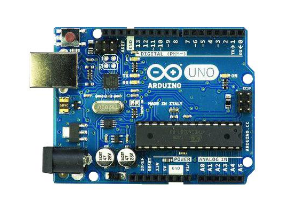
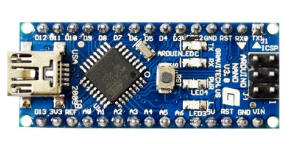
Plăcile din seria Arduino reprezintă un bun punct de plecare în studiul roboticii, astfel că acest manual se va axa asupra a două dintre plăcile Arduino și anume Arduino UNO – cel mai cunoscut model din această serie și Arduino NANO.
Actualmente există nu mai puțin de 17 variante de plăci Arduino, iar cele mai cunoscute sunt prezentate în următorul tabel:
Principalele proprietăți ale plăcii Arduino UNO / NANO
Ambele plăci – Arduino UNO și Arduino NANO – sunt plăci de dezvoltare open-source realizate pe baza microcontrolerului ATmega328P. Acesta din urmă prezintă un procesor AVR cu o arhitectură de tip RISC.
Din punct de vedere al microcontrolerului avem următoarele specificații:
- viteza de 20 MIPS
- 32 kb de spațiu de stocare pentru program din care 2kb sunt ocupați de bootloader
- 2 kb de memorie echivalentă RAM (de lucru)
- 1 kb de spațiu de stocare EEPROM
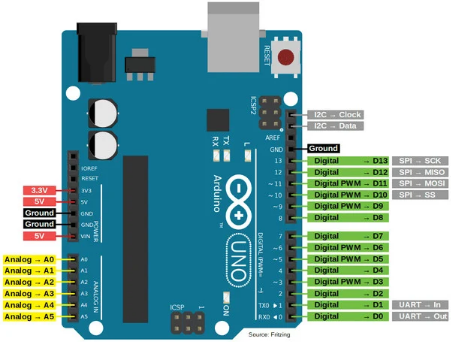
Din punct de vedere al specificațiilor de conectare avem următorii pini:
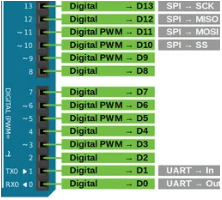
- D0-D13: 14 pini digitali de intrare/ieșire, din care:
- 2 pini (D0 și D1) sunt RX și TX
- 12 sunt digitali, din care:
- 6 pini (D3, D5, D6, D9, D10, D11), cei cu semnul “~”, sunt conectabili la module PWM
- 4 pini (D10, D11, D12, D13) conectabili la SPI / ICSP
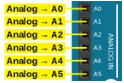
- A0-A5: 6 pini analogici de intrare, din care 2 pini sunt SDA (A4) și SCL (A5)
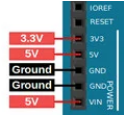
- IOREF: pin folosit ca referință de intrare/ieșire; oferă referința de tensiune cu care funcționează microcontrolerul
- RESET: pin care resetează Arduino
- 2 pini de alimentare (unul de 5V și celălalt de 3,3V)
- GND: doi pini de ground
- VIN: un port de alimentare a plăcii Arduino folosind o sursă de alimentare externă; tensiunea trebuie să se incadreze între 7-12V.
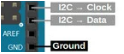
- I2C Clock (SCL): pin folosit pentru a sincroniza transferul de date între dispozitivele I2C
- I2C Data (SDA): pin utilizat pentru transferul efectiv de date între dispozitive
- GND: un pin de ground
De asemenea, mai regăsim:
- 1 mufă USB-B
- 1 mufă de alimentare DC
Explicația acronimelor folosite:
AVR = este o familie de microcontrollere care au la bază un procesor RISC cu o arhitectură Harvard, adică unitatea centrală de procesare are memoria de program separată de memoria de date.
RISC (Reduced Instruction Set Computer) = calculator cu set de instrucțiuni reduse, este o arhitectură de microprocesor/calculator cu un set de comenzi simple și rapide, în care viteza crește datorită simplificării instrucțiunilor.
MIPS (milioane de instrucțiuni pe secundă) – unitate de măsură a vitezei procesorului.
Kb (KiloByte) – unitate de măsură a informației.
RAM (Random Access Memory) – memorie cu acces aleatoriu, se șterge la întreruperea alimentării.
EEPROM (Electrically Erasable Programmable Read-only Memory) – memorie non-volatilă (nu se șterge), pentru stocarea de informații și după oprirea alimentării.
RX si TX – folosiți pentru a recepționa (RX) și a transmite (TT) date în comunicații cu alte module sau plăci Arduino.
PWM (Pulse-Width Modulation) – pini digitali speciali care sunt capabili să genereze semnale omonime. PWM este o tehnică utilizată pentru controlul intensității sau a vitezei unui dispozitiv sau a unei componente.
SPI (Serial Peripheral Interface) este un protocol de date seriale utilizat de microcontrolere pentru a comunica cu unul sau mai multe dispozitive externe într-o conexiune de tip magistrală.
ICSP (In-Circuit Serial Programming) – numele provine din anteturile de programare în sistem (ISP). Acești pini permit utilizatorului să programeze firmware-ul plăcilor Arduino.
SCK (Serial Clock) = un semnal de ceas generat de dispozitivul master pentru sincronizarea transmisiei de date.
MISO (Master In Slave Out) = o linie pentru trimiterea datelor către dispozitivul master.
MOSI (Master Out Slave In) = linia master pentru trimiterea datelor către dispozitivele periferice.
SS (Slave Select) determină cu ce dispozitiv comunică masterul.
GND (Ground) – pinii GND sunt utilizati pentru a închide circuitul electric și pentru a oferi un nivel comun de referință logică în întregul circuit.
VIN (Voltage Input) = tensiune de intrare.
I2C – este un protocol de comunicație.
SCL (Serial Clock) – este linia de ceas proiectată pentru a sincroniza transferurile de date.
SDA (Serial Data) – este linia utilizată pentru transmiterea datelor.
USB-B (Universal Serial Bus – B ) = tip de port USB.
DC (Direct Current), curent continuu.